GPT-4不是世界模型 ACL力证LLM永远无法模拟世界
大模型是世界模型吗?UA微软等机构最新研究发现,GPT-4在复杂环境的模拟中,准确率甚至不及60%。对此,LeCun激动地表示,世界模型永远都不可能是LLM。一直以来,对LLM的支持观点之一,就是模型可以集成海量事实知识,作为通往“世界模拟器”的基础。虽然也有不少人提出反对,但没有真凭实据。那么,LLM可以作为世界模拟器吗?
最近,亚利桑那大学、微软、霍普金斯大学等机构联合发布了一篇论文,从实证的角度得出了否定的结论。
最新研究已被ACL 2024顶会接收。

论文地址:https://arxiv.org/pdf/2406.06485
研究发现,GPT-4在模拟基于常识任务的状态变化时,比如烧开水,准确度仅有60%。

论文认为,尽管GPT-4这样的模型表现很惊艳,但如果没有进一步创新,它就不能成为可靠的世界模型。
为了量化LLM的规划能力,作者提出了一个全新的基准测试——bytesized32-state-prediction,并在上面运行了GPT-4模型。
基准测试的代码和数据也已经在GitHub上开源,可以帮助未来的研究继续探查LLM的能力优缺点。

https://github.com/cognitiveailab/GPT-simulator
一向对自回归语言模型无感的LeCun也转发了这篇论文。

他用了非常强硬的语气表示,“没有世界模型,就没有规划能力”。

虽然如此,只凭一篇论文又怎么能平息LLM界的重大分歧?支持语言模型的网友很快就在评论区下面反驳LeCun——

网友:目前的LLM能达到约60%的准确率(不专门为任务进行训练),这至少是某种“世界模型”了,而且每一代LLM都在提升。
LeCun:世界模型不会是LLM。
网友:也许吧。但这并不意味着LLM内部不存在某种(不准确的)世界模型。
不过,在Hinton看来,AI已经不再是仅仅依赖于过去,基于统计模型做下一个token的预测,而是展现出更高的“理解”能力。

然而,大模型想要成为世界终极模拟器,还很远。
LLM是“世界模拟器”吗?
模拟世界,对于AI学习和理解世界至关重要。
以往,多数情况下,可用模拟的广度和深度受到现实的限制。因需要人类专家耗费数周,甚至数月的时间做大量的工作。
而现在,大模型提供了一种替代的方法,即通过预训练数据集中大量知识,获得对世界的深刻理解。
但是,它们准备好,直接用作模拟器了吗?
对此,这项研究的团队在“文本游戏”这一领域,来检验这一问题。
一般来说,在世界建模和模拟的背景下,应用LLM有两种方式:一是神经符号化方法;二是直接模拟。
论文中,作者们首次对LLM直接模拟虚拟环境的能力,进行了量化分析。
他们利用JSON模式的结构化表示作为脚手架(scaffold),不仅提高了模拟精度,还可以直接探查LLM在不同领域的能力。
结果发现,GPT-4普遍无法捕捉与智能体行为无直接关联的“状态转移”(state transition)。

甚至还包括,涉及算术、常识,或科学推理的状态转移。
在各种不同条件下,对于模拟一些复杂环境变化时,GPT-4的准确率不及59.9%。
同时也表明,LLM还不足以可靠地充当世界模拟器。
那么,研究人员具体如何实现的?
研究方法
在文本环境中,智能体通过自然语言,完成特定的目标。
他们将文本的虚拟环境形式化,建模为一种马尔可夫决策过程(POMDP),共有7个元组:S, A, T , O, R, C, D。
其中,S表示状态空间,A表示行动空间,T:S×A→S表示状态转移函数,O表示观测函数,R:S×A→R表示奖励函数,C表示用自然语言描述目标和动作语义的“上下文信息”,D:S×A→{0,1}表示二元指示函数,用0或1标记智能体是否完成任务。
其中,上下文C为模型提供了除环境外的额外信息,比如行动规则、物体属性、打分规则和状态转换规则等等。
然后,研究人员还提出了一个预测任务,称为LLM-as-a-Simulator(LLM-Sim),作为定量评估大模型作为可靠模拟器的能力的一种方法。
LLM-Sim任务被定义为实现一个函数

作为世界模拟器,将给定的上下文、状态和动作(即

)映射到后续的状态、奖励和游戏完成状态(即

)。
每个状态转移用如下的九元组表示:

实际上,整个状态转换模拟器F,应该考虑两种类型的状态转移:行为驱动和环境驱动的转移。
对于图1中的示例,行为驱动的状态转移是在执行“打开水槽”动作后,水槽被打开。而环境驱动的转移是,当水槽打开时,水将填满槽中的杯子。
此外,LLM的预测模式也分为两种:预测下一步的完整状态,或者预测两个时刻之间的状态差。

为了更好地理解LLM对于每种状态转移的建模能力,研究人员进一步将模拟器函数F分解为三种类型:

评估结果
建模了LLM的决策过程后,作者也同样用文本构建了一个虚拟人物场景。
Bytesized32-SP基准测试的数据来源于公开的Bytesized32语料库,其中有32个人类编写的文字游戏。
留出一个游戏作为gold label后,测试集总共涉及31个游戏场景,7.6万多个状态转换。

LLM根据上下文和前一个状态进行单步预测,给出下一步时的物体属性、任务进展等信息。
规则方面,研究人员也提出了三种设定:由游戏作者撰写、由LLM自动生成,或者根本不提供规则。
设定好虚拟环境和任务规则后,作者运行GPT-4进行预测得到了如下结果。

为了严谨起见,作者根据状态转移前后预测结果是否变化,分成static和dynamic两类分开统计。如果前后两个状态中,结果并没有发生变化,LLM也会更容易预测。
不出意料,static一栏的准确率基本都高于dynamic。
对于“静态”转移,模型在预测状态差时表现更好。“动态转移”则相反,在完整状态预测中得分更高。
作者猜测,这可能是由于预测状态差时需要减少潜在的格式错误,这会为任务输出带来额外的复杂性。
还可以看到,预测动作驱动的状态转移的准确率往往高于环境驱动类。在dynamic栏,前者预测最高分有77.1,而后者最高只有49.7。
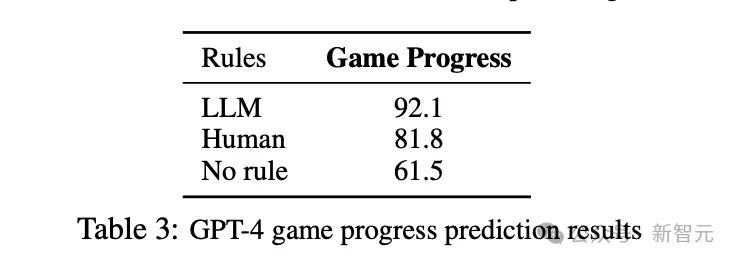
此外,游戏规则如何制定会很大程度上影响LLM的表现。
如果不提供游戏规则,LLM预测的性能会有明显的大幅下降,但规则由人类制定或LLM自动生成并不会显著影响准确率。
相比之下,规则制定对游戏进度预测的影响更加明显。
相比人类规则,LLM生成规则时,GPT-4的预测有超过10个百分点的提升。难道真的是LLM之间更能相互理解?
以上结果都只是针对LLM在不同设定下的性能比较。和人类预测相比,结果如何呢?
为此,4位论文作者亲自上阵和GPT-4一较高下。
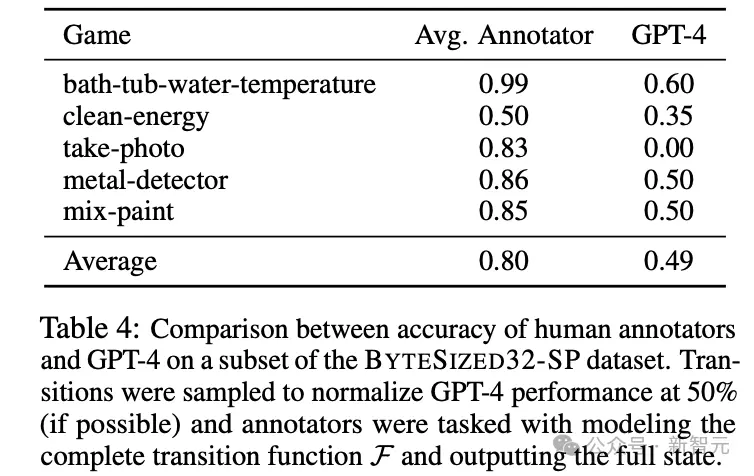
不知道李世石看到这个结果会不会有所安慰。人类的总体准确率在80%左右,远高于GPT-4在50%附近徘徊的成绩,这显示了规划能力上的重大差距。
对于规划任务中的单步预测模型,每一步的模拟误差都会累积并向后传播,单步的低性能会很大程度上影响全局表现。
因此LLM较低的准确率说明了,它并不能成为可靠的“文本世界模拟器”。
此外,人类准确率的波动幅度基本不大,说明任务设定比较简单、直接,适合人类的思维模式。
GPT-4这种较差的性能表现给我们提供了一个宝贵的机会,可以更具体地剖析LLM究竟在哪方面出现了能力缺陷。
因此,论文作者将LLM的预测结果拆开仔细分析,发现在二元布尔值属性上(is开头的属性),模型通常可以做得很好。
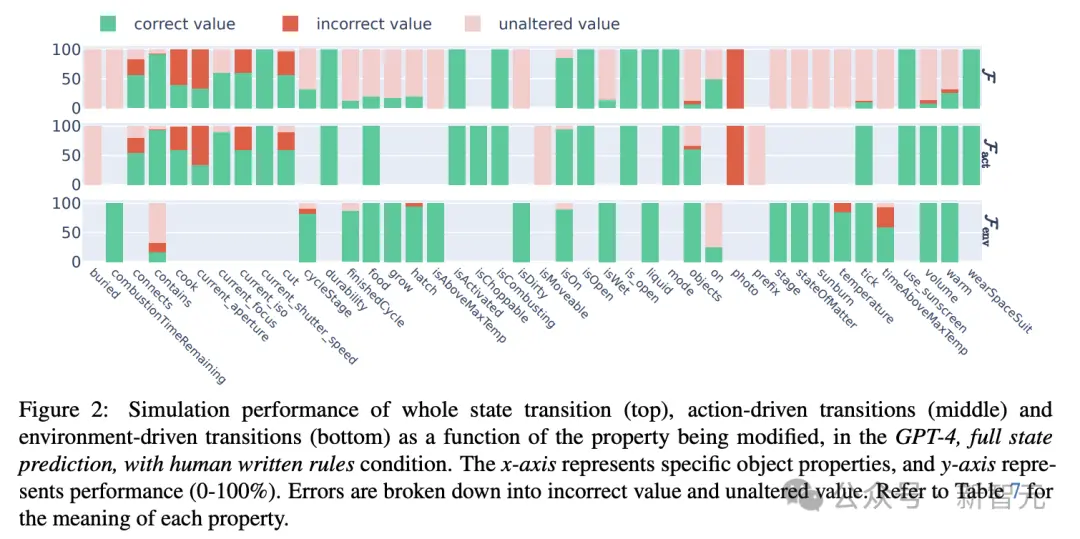
预测表现比较糟糕的,通常是一些非平凡属性,比如需要算术运算的temprature(温度)、需要常识的current_aperture(当前照相机光圈),或者需要科学知识的on(灯泡是否打开)。
相比之前的基准测试,这似乎更准确地暴露了LLM在常识和科学推理方面的缺陷。
此外,这也能反映出模型一些行为的“偏执”之处。
在进行完整预测时,它通常过于关注动作驱动的状态转移而忽略了环境驱动,出现了很多“未改变值”的错误。但是可以在分开预测的结果中看到,这些错误是本可以避免的。
作者提出,这篇文章的局限性之一是只使用了GPT模型进行测试,也许其他模型可以有不同的表现。
这项研究的意义更在于基准测试的提出,为探索LLM在“世界模拟器”方面的潜力提供了一套可行的问题形式定义和测试流程。
参考资料:
https://x.com/ylecun/status/1801978192950927511
https://arxiv.org/pdf/2406.06485





















