我跑滴滴的机会也没了?到底是谁在抢老司机的饭碗?
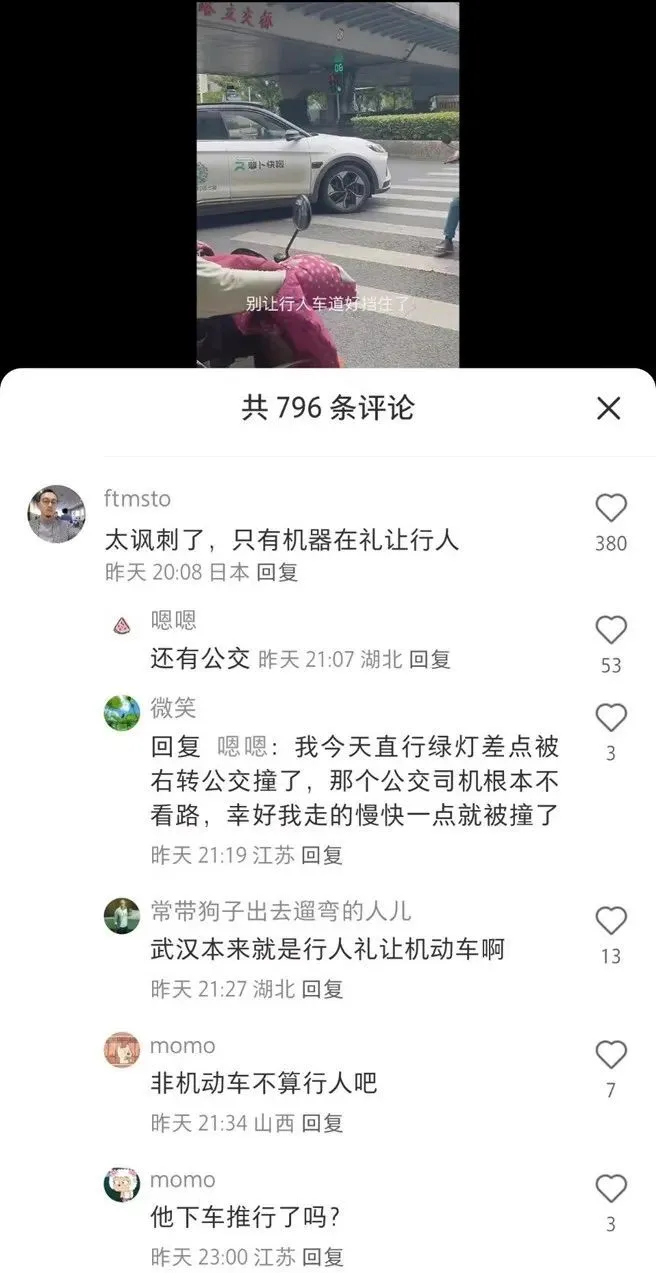
这几天,“苕萝卜”之名迅速火遍了大江南北。无数人——不管TA在哪里,都曾看到、听到或者至少刷到过萝卜快跑在武汉的江湖传言。他家的无人驾驶出租车就因为严格礼让行人、造成交通拥堵,被武汉人戏称为“苕萝卜”(苕这个字在武汉话里有笨的意思)
无人车的恪守交规,也和人类司机的彪悍成了鲜明的对比。毕竟这里可是“全员鄂人”的湖北,因为热衷于开快车,
在2022年的事故率高居全国第一


再比如,萝卜快跑2公里的路打完折只要5块钱,在北京甚至比拼车还便宜:

再比如,萝卜快跑会默认所有人都能遵守交规,往往因为面对违法司机反应不及时导致撞车:

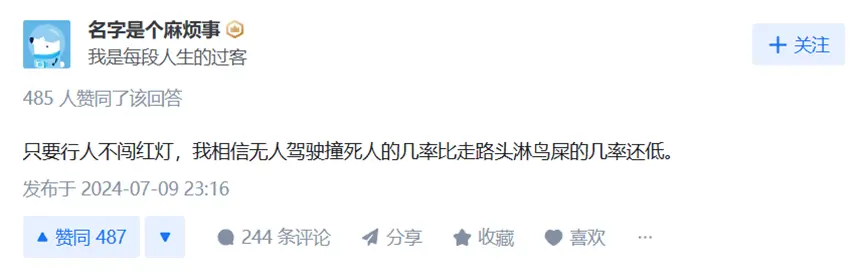
这种对行人唯唯诺诺、对违法司机重拳出击的风格,也让萝卜快跑在短短几天时间里成了网友口中的“马路判官”。哪怕是当街撞到了行人,大家也觉得一定是行人的错。

说到这里,相信很多小伙伴会好奇:既然车企们推出的辅助驾驶,责任依然是由司机来承担。要是无人驾驶出租车发生了事故,责任到底该怎么算?
虽说相关法律法规还在完善,但前不久《北京市自动驾驶汽车条例(征求意见稿)》中已经提到,要由车辆所有人、管理人来承担责任。

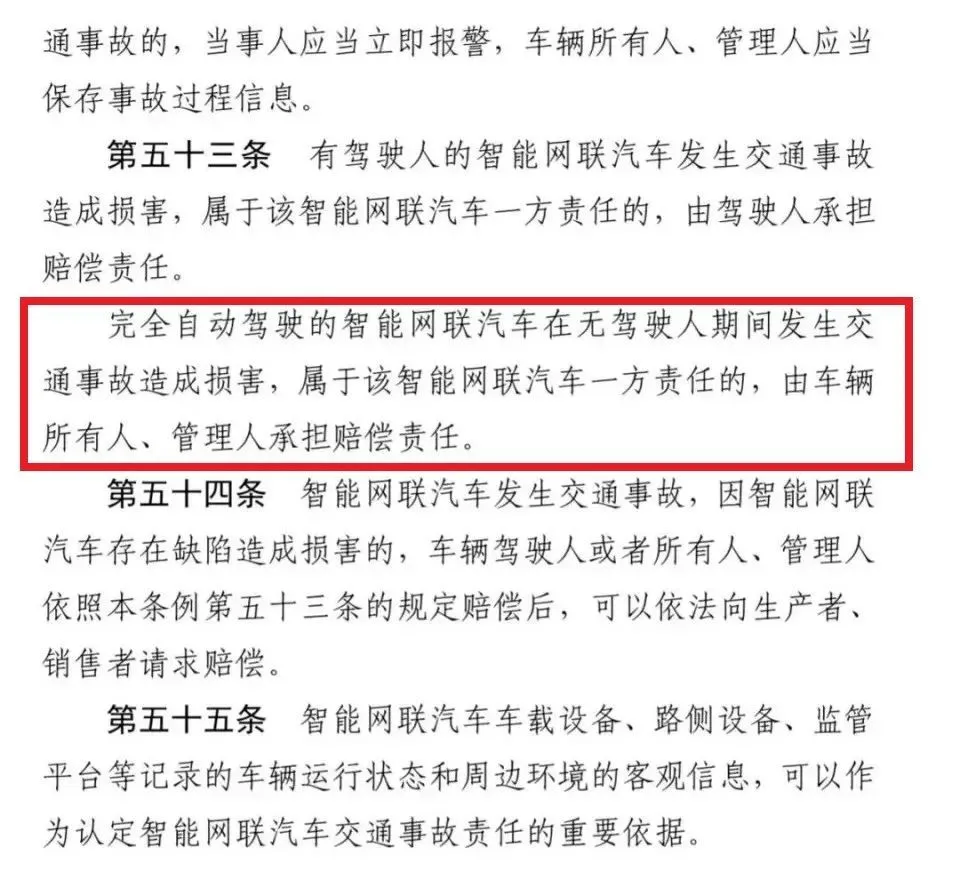
这也就意味着,如果无人车违法了,不会扣分,但罚款要由萝卜快跑来交;如果发生事故且无人车有责任,那要由萝卜快跑来进行赔偿。
如果这类条例顺利通过,所谓的“马路判官”说不定还真能改天换地,还大家一个遵守交规的清朗人间!
那么问题来了,无人驾驶出租车,它到底什么时候能普及?又会不会像很多人说的,抢走司机们的饭碗?
今天就先从大洋彼岸的美国开始,和大家好好聊一聊。
01. 无人驾驶水深火热?
有句老话说得好,
“摸着鹰酱过河”错不了
相比于最近才在武汉铺开的萝卜快跑,美国可是早早地就开始了robotaxi的测试和运营。之前社长也给大家盘过这两家扛把子——Google的Waymo和通用的Cruise。
详情请戳:新年第一烧!惹众怒的无人车,究竟动了谁的奶酪?
但是吧,Waymo和Cruise遇到的情况比“苕萝卜”还尴尬,毕竟咱们这只有司机抵制萝卜快跑,既没往“苕萝卜”上放雪糕筒逼停,也没直接放火烧车啊


至于为啥美国老百姓对robotaxi意见这么大,一定程度上也是可以理解的。
就拿Cruise来说,他家robotaxi的胆子是真的大!
在路中间停摆导致拥堵、挡住救护车导致抢救延误、未检测到事故中被撞击的行人,导致二次碰撞还拖拽……无论哪一条单拎出来,都值得打上50大板。这也导致Cruise在加州运营和测试的时候,必须有安全员才能上路。
隔壁的Waymo也没好到哪去,先是在去年在旧金山撞死了一条狗,后在今年年初撞到了一名骑自行车的人,没过多久又有两辆robotaxi先后撞上了同一辆卡车……逼着Waymo召回了444辆车以提升安全性。

除了安全之外,美国人不信任robotaxi还有一个重要因素:智驾的普及率和认知度,可比咱们差远了。
那么多家美国车企,真正在智驾上能拿得出手的,差不多也就一家特斯拉和一家通用,而FSD和Super Cruise的选装价格都可以说是高到天际。
再叠加巨大的“老旧燃油车”保有量,智驾能
带来的认知改变很难说举足轻重,只能说是聊胜于无
更不用说那些只有大城市居民才能接触到的robotaxi了。

就在这两天,特斯拉宣称要在8月8日亮相的robotaxi也又双叒叕跳票了,而推迟到10月发布的原因是“得多造几辆无人驾驶出租车才行”。
抛开美国极客对特斯拉FSD的溢美之词不谈,这个理由确实稍显牵强了点:说好的“车主不用车的时候,让特斯拉出去当出租车赚钱”呢
至于10月份特斯拉会不会跳票,我们到时候再看。至少在目前,业内把robotaxi划分成了3个阶段。
第一阶段,要求道路标线清晰、交通较为顺畅,在天气晴朗的白天以固定区域运营,车速也不会太快(北京亦庄、上海嘉定等地区的测试车辆处于这一阶段);
第二阶段,能适应多种路线,也能在车流密集的市区自由活动,车辆速度得以提升,但还是会受到恶劣天气等因素影响(武汉的萝卜快跑处于这一阶段);
第三阶段,也就是终极阶段——不附加任何条件的无人驾驶,可以和真人司机一样提供任何形式的驾驶服务。
如此来看,无人驾驶车的种种安全事故,都属于是黎明前的黑暗。
但黎明,究竟还有多远?
02. 辅助驾驶跑步前进?
2015-2021这几年,全球自动驾驶行业进入了一个投资高峰期。和无数热钱一同涌入的,是投资人和初创公司对自动驾驶的雄雄野心。

自动驾驶领域被视为万亿市场起步的掘金场,光robotaxi一条赛道就被认为市场规模将在2030年突破2.93万亿元,很多人都梦想着在robotaxi上面复刻网约车的成功。
然而事与愿违,鉴于自动驾驶迟迟无法突破第三阶段、实现商业化落地,自动驾驶公司们纷纷身陷囹圄,还能活下来的基本都选择了降维辅助驾驶,去挣活命钱。
能够量产的辅助驾驶,也在近两年有了突飞猛进的发展。

不说特斯拉的FSD,就说国内,在智驾上卷得那叫一个精彩。“蔚小理”搞自研,华为、Momenta、大疆等等给车企当供应商,不同智驾解决方案百花齐放。
什么车道保持、自适应巡航、记忆泊车、领航辅助……纯以体感定论,甚至有几个品牌已经可以独立应对路况复杂、人车众多的城区环境了。
考虑到robotaxi们也并没有那么靠谱,常常整出点人工智障的乐子,双方如今的差距其实并没有很多人想象的那么大,甚至可以说只不过是一纸法规之隔。
那么,这些年究竟发生了什么?我们先来看几个名词解释(也可以看下面这个视频了解,更加直观,不是广告,放心食用):
NOA,全称Navigate on Autopilot,意为领航辅助驾驶,和NGP、NCA等各家不同名字所指的都是一个东西,是我们目前能在市售量产车型上体验到的最高水准智能驾驶;
端到端,其中两个端指的分别是输入端和输出端,本质是输入信息、输出决策的简称,为更流畅的NOA提供了实时分析路况的能力;
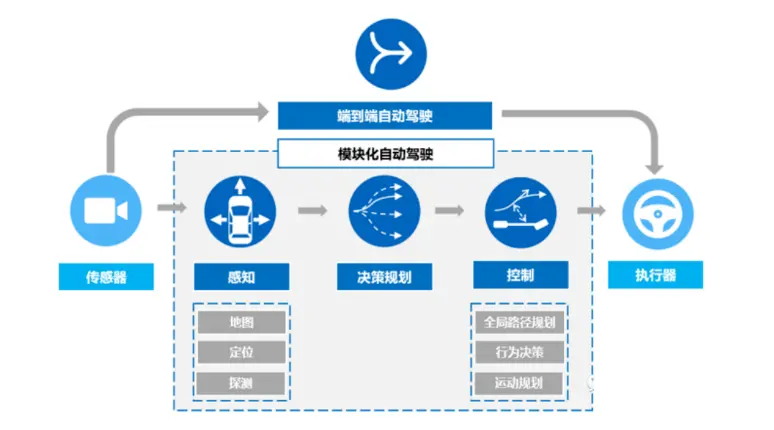
BEV+transformer,直译是鸟瞰图视角+基于注意力机制的神经网络模型,意译一下就是把感知和大模型结合起来,这个组合奠定了端到端出现的基础。
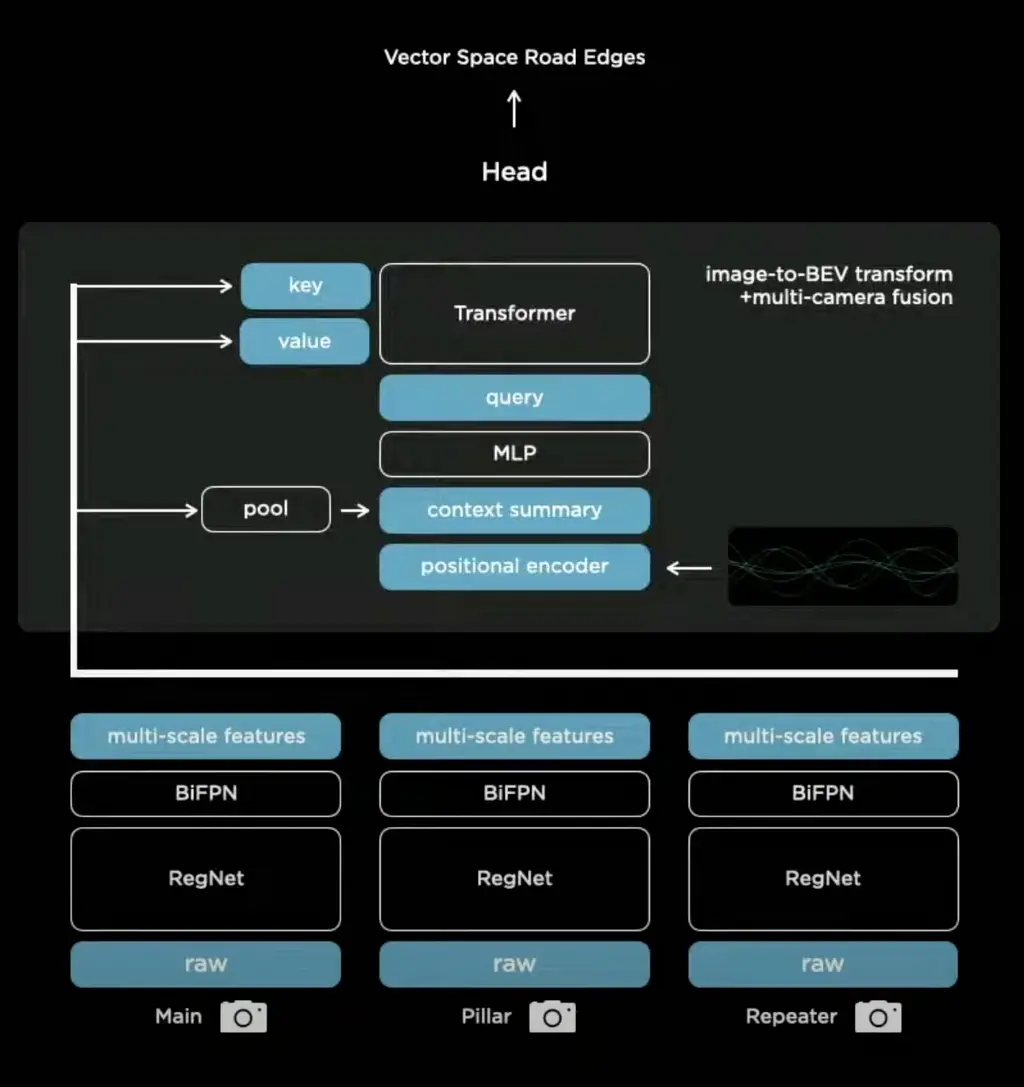
2021年7月,特斯拉最先将BEV+transformer的感知范式应用到了智能驾驶当中,大家发现“这玩意真™好用”!随后整个汽车行业也都纷纷开始采用。

这一新武器最大的优点就是提升了自动驾驶的上限,并且极大加快了发展速度。
此前自动驾驶的逻辑是规则驱动,车辆遇到什么场景该解决什么问题,对应一条条撰写好的代码,要是遇到没有预先设想到的场景,那对不起,解决不了!当街宕机吧!
业内人士对这种应对方式用“机械”来形容,很符合人类对机器的刻板印象。规则里让它走直线通过,它就绝对不会绕路。

但BEV+transformer的出现,让自动驾驶的逻辑转换为数据驱动,相当于为自动驾驶车辆赋予了一个随身大脑,之前没见过的场景没关系,看看大脑里有类似的吗?有啊,那好,拿过来用用!
这也是车企目前最喜欢宣传自家智驾产品“像老司机”、“更拟人”的原因。
正因有了大模型的支持,智能驾驶系统是可以学习可以被训练的,而它们所学习的就是无数人类驾驶员的驾驶数据,人类怎么决策怎么开,它们就怎么学。

学的是人,学出来自然像人
对比此前由规则驱动的自动驾驶,数据驱动的自动驾驶更灵活、进步更快,好比同样学一道题,前者是学一道会一道,换个数都不行;后者是举一反三、触类旁通,学起来自然效率更高。
再配合从几万甚至几十万降到如今千元级的激光雷达等硬件,从L2辅助驾驶开始的渐进式发展路线,就这么向着自动驾驶的目标大踏步前进。

借用Momenta创始人曹旭东的说法,“(如今包含NOA的辅助驾驶功能在)智驾体验的提升,能达到两年十倍。FSD V11版本和Waymo在体验上还有巨大差距,但最新的V12和Waymo已经非常接近了。”
从2021年到如今的2024年,时间也过去3年了,特斯拉能做到的提升,和特斯拉采用同一大方向的其他车企或供应商也完全可以,无非是进度快一点、慢一点的分别。
即使自研能力不足、或是不想在智驾方向大规模投入的车企,也可以找华为这样的供应商合作。
所以换句话说,并不是特斯拉一家独大,而是整个行业都已经发展到了“有导航就能开”、“全国都能开”的水平。
而随着规模化效应提升,智驾的体验必然越来越好、门槛越来越低,眼瞅着就要“自下而上”完成自动驾驶的终极目标了。这也是特斯拉宣布推出robotaxi最大的底气。
03. 还有多久普及?
社长有位朋友在无意间刷到萝卜快跑的视频之后,脱口而出一句话:“这玩意要是真的这么好,怎么还没普及?”
相信对robotaxi抱有同样期待的人还有很多。但有点可惜的是,现实可能要让他们失望了。
首先一点,作为直接影响道路交通安全的重要变量,无人驾驶车辆不可能比法规先行。
不论中美,robotaxi能测试运营的地方,都必须经过当地法规或者监管部门允许,运行时间、运行范围、安全员的设置,无一能由自动驾驶公司自专。

(就连上下车地点都是固定的)
像网约车那般一夜之间革了出租车的命的情况,没法在robotaxi上复刻。就像我们开头说的,万一出了有责事故,萝卜快跑是要承担赔偿责任的。
所以不管萝卜快跑再怎么火遍全网,在确保100%的安全之前,后台也必然会有安全员;除此之外,用以训练无人驾驶技术的道路数据也是由人类驾驶员开车提供的。
如果用学骑自行车去类比,当下安全员做的就是在后面扶车的工作,在确定不会摔跤之前,扶车人是撤不走的。短时间之内,这些岗位还需要由“老司机”们担任。
另一方面,大模型也不是万能灵药,药到病除。
AI产业爆发至今,大模型被称为“暴力美学”,英伟达是怎么靠卖卡占据不可替代生态位的?因为算力就是智驾的基础,高算力就代表了无限可能。
可不仅算力在膨胀,训练大模型所用的数据也在膨胀、大模型本身也在膨胀。就有点像大家手里的智能手机,多大内存都不够用,一两年后还是会卡。
如何驯服这一暴力美学,让它向着合理的方向进化是个难题。
而即便算力充足,也不能保证自己的无人驾驶出租车就100%安全,哪怕AI的发展为自动驾驶赋予了更多可能。
以前用代码写就的规则,现在用数据训练的大模型,都无法模拟出全部的行车场景,毕竟人生都总有意外会发生,何况复杂的道路呢?

这就有点像游戏里的探索扫图,角色走到哪里,就清楚掉哪里的一部分迷雾,可自动驾驶广阔的边界不是游戏里有限的地图,总会有哪个犄角旮旯(也就是业界所说的corner case)轻易过不去,最后发现前方有堵空气墙,得绞尽脑汁才能绕过去。
如果你是自动驾驶公司,很幸运的活到通关那一天,且技术水平足够推向市场了,那么将面临一个严峻的问题:
烧了那么多钱,要是想尽快回本,在定价环节就必须好好斟酌。
现阶段“苕萝卜”有硬伤还能爆单,正是因为萝卜快跑终端收费够便宜。“一公里一块钱”的价格这谁顶得住?它让行让5分钟我都得夸它有礼貌

但可惜的是,等到萝卜快跑正式市场化运营的那一天,“一公里一块钱”对应现在48万元一辆的五代无人车、哪怕是未来20.46万元的六代无人车,可能也很难盈利。
就算智驾软件没有寿命、可以持续迭代,未来的算力也越来越便宜。但车辆本身有60万公里的报废年限,还要叠加保养、维修、洗车、充电等等的费用,这些都会体现在成本上,摆到自动驾驶公司面前。

所以所谓的低价恶性竞争,其实并不准确。现阶段的无人车与其说是为了挣钱,不如说是为了验证技术并收集行驶数据,顺便回点血,根本覆盖不了投入的成本。
要真正实现市场化,无人驾驶出租车不仅要完善技术,同时整车成本也得继续往下降。
而这两点,都需要时间。
写在最后
据官方预计,到2024年底,萝卜快跑将在武汉实现收支平衡,并于2025年全面进入盈利期。
看起来确实很诱人,但结合我们刚才的分析,很难不去怀疑这是不是“狼来了”的故事。毕竟“无人驾驶出租车一出,谁与争锋”的名场面,始终未能出现。
而在漫长的投入和持续的烧钱中,许多公司和项目胎死腹中,还活下来的纷纷在现实的打击下,选择了曲线救国——
先给车企供应能量产的L2辅助驾驶,有了进项再向着L4自动驾驶徐徐图之。
百度Apollo的领航辅助驾驶,就是百度基于无人驾驶出租车业务难以落地的现实,而开辟出的“第二战场”。

而随着这些自动驾驶公司的“降维打击”,从某一段无需接管的行驶体验来说,当下最领先的辅助驾驶跟真正的无人驾驶几乎无甚差别。
这是一场出发点不同,却殊途同归的双向奔赴。
2023年的GTC大会上,英伟达CEO黄仁勋用一句“AI的iPhone时刻已经到了”,宣告了AI产业的大爆发。

Waymo、Cruise、萝卜快跑在公众层面所引发的关注,不禁让关注自动驾驶的爱好者思考:是否自动驾驶的“iPhone时刻”也已到来?
而我们,又是否已经做好准备?