日本川崎重工公布可骑乘四足行走机器人CORLEO
摘要:
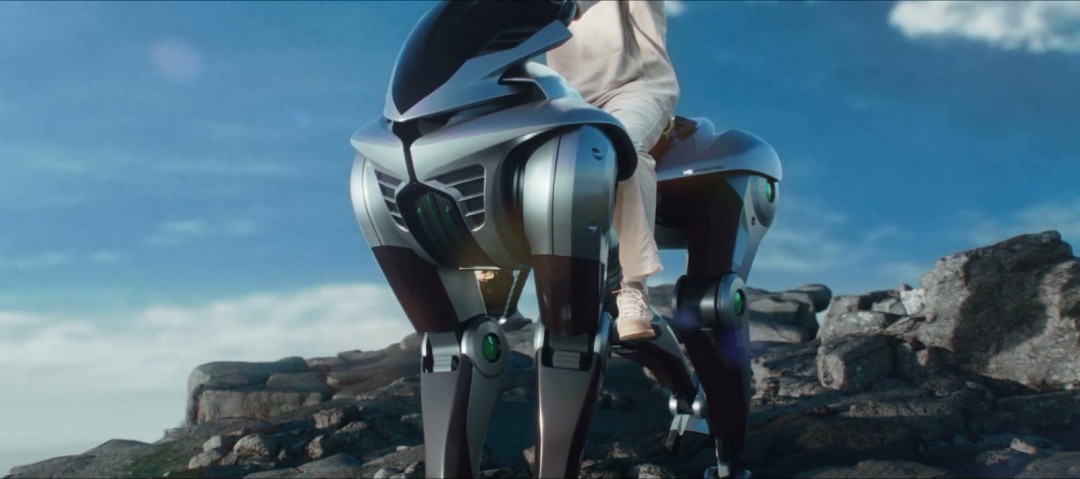
4月3日,日本川崎重工集团公布了可供人类骑乘的四足机器人概念模型“CORLEO”。该机器人以氢气作为动力源,通过骑手转移重心来控制,就像骑马一样。CORLEO计划在2025年4月13日开幕的日本国际博览会(以下简称“大阪·关西博览会”)上展出。

此次发布的“CORLEO”是川崎重工集团为“大阪·关西博览会”未来社会展示项目“未来生活博览会·未来城市”所准备的2050年概念模型。
概念视频(CGI):
日媒报道川崎重工CORLEO:
该机器不仅拥有机器人技术带来的四足崎岖路面行进能力,还融合了川崎重工在摩托车领域深耕的机动性与稳定性。它可以像骑马一样进行控制,即使是初学者也可以安全可靠地穿越山脉、水域等轮胎难以行驶的地形。
机器前部搭载的面板会显示导航系统,包括氢气剩余量、到山顶的路线、重心位置等信息。夜间时,它还能通过照射路面上的路径标记,为骑手提供更优化的骑行支持。
此外,作为一款可持续移动工具,该机器搭载了150cc的发电用氢燃料引擎。氢气由后部搭载的储存罐供应,利用引擎产生的电力驱动安装在四条腿上的动力单元。
川崎重工集团在参加大阪·关西世博会之际,发布了名为“移动本能”的展示主题,其理念是“通过移动感受幸福”。这款机器CORLEO正是体现该主题的产物,它寄托着一种愿望:希望人们能以壮丽的大自然为舞台,驰骋于群山之间,呼吸纯净的空气,欣赏令人惊叹的美景,从而解放人类的移动本能。




视频画面:
































热门评论
>>共有0条评论,显示0条