德国维尔茨堡大学研究团队近日研发出一种由光子驱动的纳米机器人,其尺寸约为人类头发直径的五十分之一,能够在液体微观环境中精准追踪、捕获、搬运并释放细菌,为人类直接操控微生物世界提供了新的技术路径。
报道显示,这类微型机器人面向的正是传统手段几乎无法有效干预的微观尺度操作。对于单个细胞、细菌等处于液体环境中的生物材料而言,如何实现高精度控制一直是科研中的一大难题,而这项新成果表明,收集并重新安置细菌等任务如今已具备现实可行性。
研究团队由德国尤利乌斯-马克西米利安大学维尔茨堡分校教授伯特·赫希特领导。团队提出的核心方案,是利用单个光子发射时产生的微弱反冲力,驱动被称为“微型无人机”的微米级装置运动。
据介绍,这些装置内部最多可集成四个等离激元纳米天线。它们先吸收具备特定性质的光,再以定向方式重新发射光子;每一次发射都会带来极其微小的反冲力,原理上类似子弹出膛后的后坐力。由于微型机器人本身质量极低,即便这种力非常微弱,仍足以带来较高速度和快速加速度。
在最新研究中,科研人员又将这类光驱动机器人的尺寸进一步缩小至不足1微米,同时简化了其操控方式,但仍保留了基于光子反冲的推进机制。
团队利用了机器人内部天线导线会随入射光偏振方向自然对齐这一特性。通过调节光的偏振状态,研究人员即可控制机器人的朝向,而其前进动力依旧来自光子反冲,这使其操控方式更接近宏观交通工具的“转向加推进”模式。
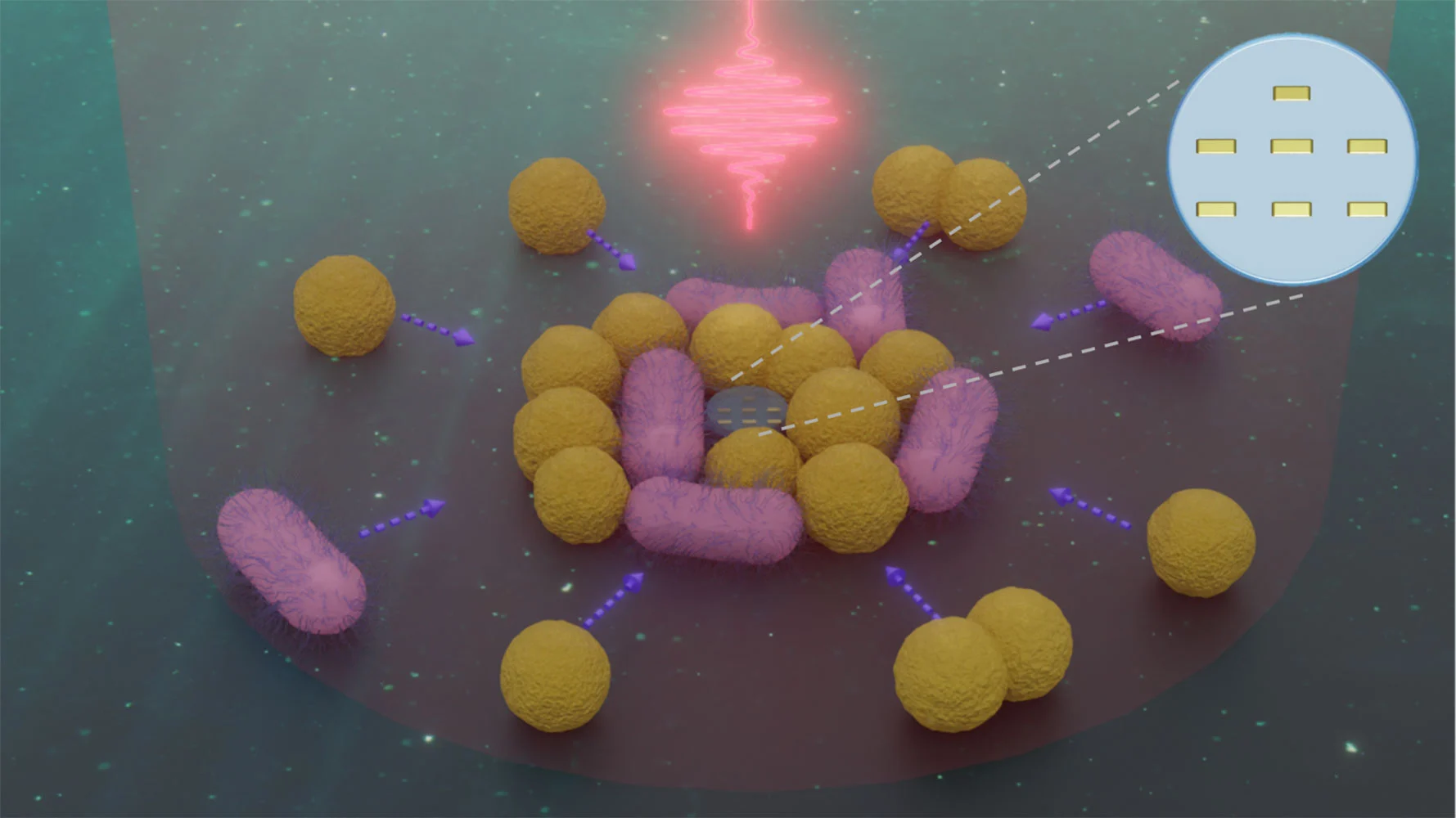
论文第一实验科学家金琴表示,从本质上看,团队构建的是一种由光驱动的纳米机器人,它能够锁定并收集细菌。由于结构得到简化,机器人尺寸已缩小到可以直接进入微生物活动的尺度,某种意义上就像“显微清洁设备”。
研究人员称,这种纳米机器人具备很高的机动性,能够快速完成90度转向,因此可以在较大样本区域内进行系统而高效的扫描。同时,它还能有选择地捕获、运输并释放数量可观的细菌。
这意味着,在受控实验环境下,这类装置有望对微观环境实施“清洁”操作——将细菌集中收拢,并转移到预定位置。
伯特·赫希特指出,这一成果生动展示了光不仅能够用来观察微观世界,还能被用于主动塑造微观世界。虽然“微型机器人清洁工”的概念听上去颇具未来感,但相关物理原理如今已经得到实验验证。
即便在携带较大细菌团簇时,这种纳米机器人依然能够保持完整的机动能力,只是移动速度会略有下降。研究团队认为,这种稳定性进一步凸显了其在微生物学、生物医学研究以及超小尺度精准操控等领域的应用潜力。
相关研究论文题为《A nanoscale robotic cleaner》,由金琴、Carsten Büchner、吴晓飞和伯特·赫希特共同署名,已于2026年3月27日发表。