哈佛大学研究人员近日开发出一套全新的3D打印技术,可直接打印出具备“编程式运动能力”的仿生肌肉纤维,为机器人实现更接近人类的柔性运动迈出关键一步。 业内认为,这项成果有望改变软体机器人、医疗器械及智能结构的设计方式。
长期以来,工程界已为机器人打造出类似骨骼、神经和感觉系统的结构,但“肌肉”一直是最难仿真的一环。 传统机器人主要依赖电机、液压和气动系统驱动,虽然动作精准有力,却往往结构刚性大、机构复杂、姿态不够优雅,很难实现类似人体那样流畅、柔软又可精细控制的运动。 此前,研究人员曾尝试以气动人工肌肉、热敏合金、电响应聚合物、磁性材料以及仿人体肌腱的拉索系统等实现软体驱动,但往往需配套笨重的外部压缩机、高电压装置或复杂机构,难以同时兼顾轻量化、响应速度与复杂形态制造。
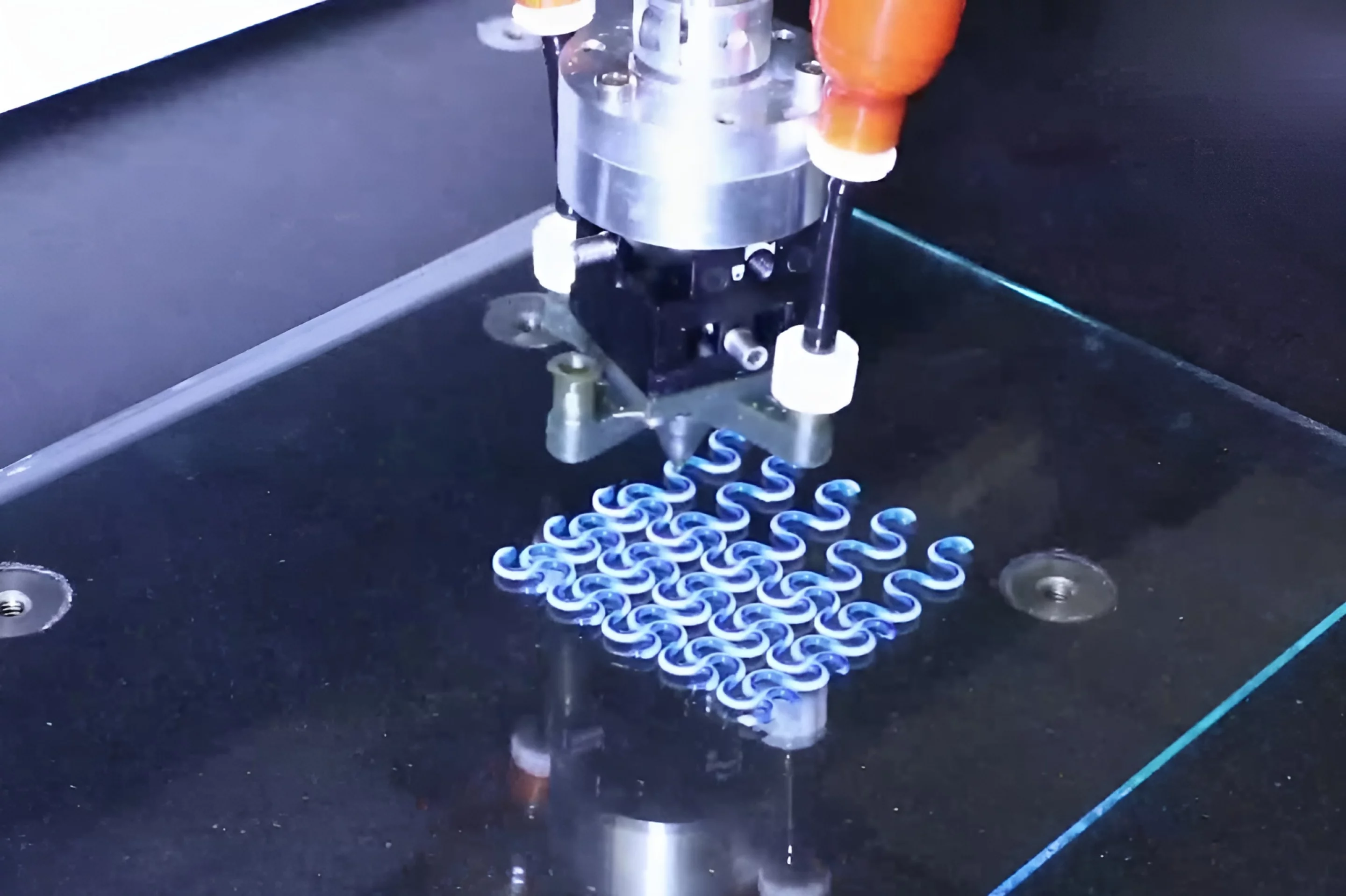
此次哈佛约翰·A·保尔森工程与应用科学学院团队提出的新方法,则试图从材料层面“内置”运动逻辑。 研究人员利用3D打印技术,将两类软性材料精确并列打印成细长的仿生“肌肉”纤维:一类为遇热会改变形状的液晶弹性体“主动材料”,另一类为抵抗形变的“被动弹性体”材料。 打印过程中,通过让喷嘴旋转,团队在微观尺度上写入了螺旋状的分子取向模式,从而精细控制不同区域的响应行为。
在加热条件下,“主动”液晶弹性体会沿特定分子排列方向发生收缩,而与之紧密相连的“被动”材料则对这种收缩形成阻抗,其结果是整根纤维会产生弯曲、扭转、卷曲甚至盘绕等复杂形变。 通过改变两种材料的排布方式及喷嘴的旋转参数,研究人员可以在单根纤维内预设不同的变形轨迹,使其在受热时按预定方式伸展、收缩、螺旋缠绕或展开,无需额外齿轮、刚性关节或后期装配机构。
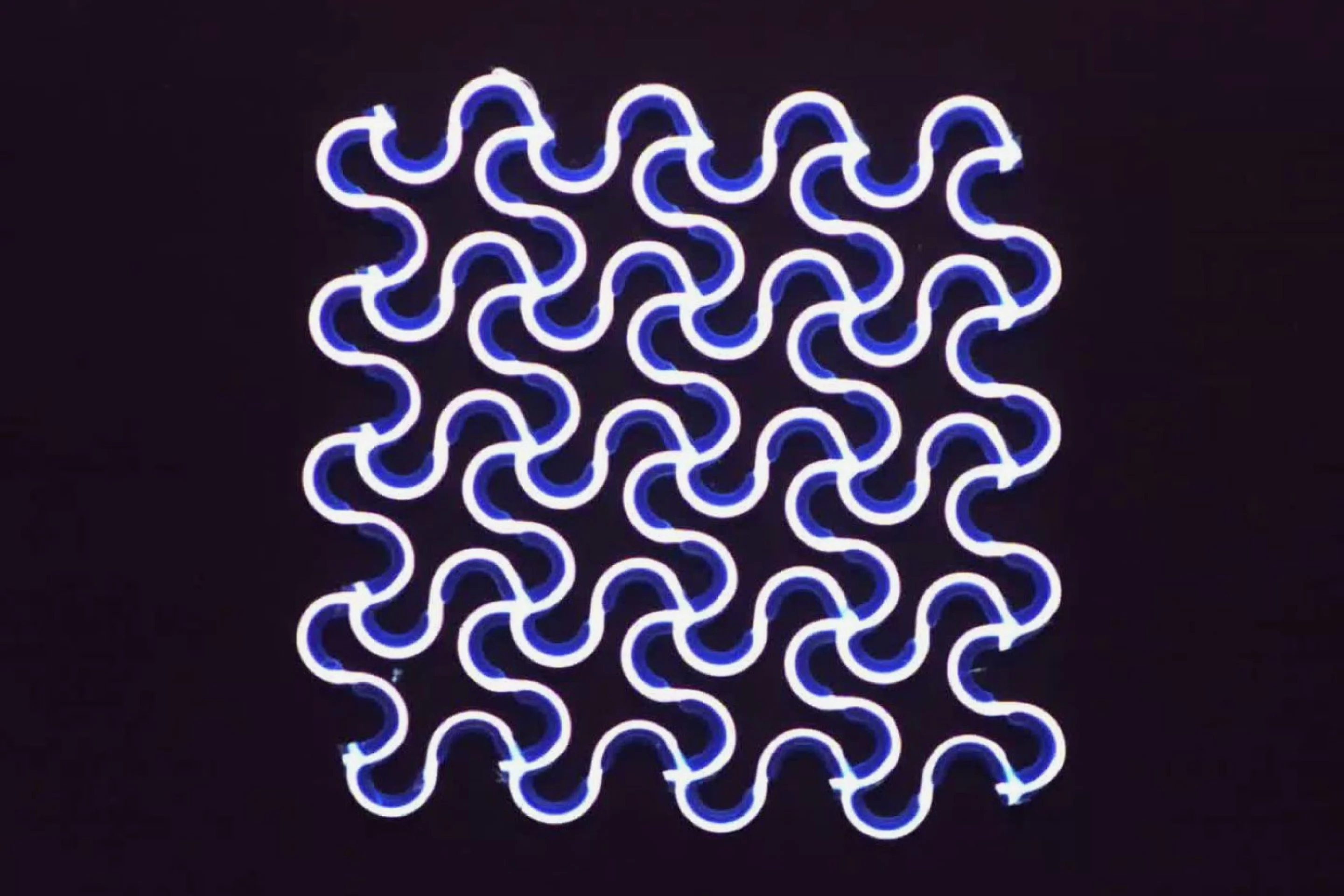
在实验展示中,团队打印了多种软性晶格结构和波浪状纤维,并通过加热观察其各自独特的形变方式。 有的结构在升温后体积明显膨胀,有的则整体收缩;平面的晶格在受热后可隆起成穹顶状曲面,展示出显著的三维形变能力。 研究人员还利用这类材料制作了软体抓取器,能够在靠近物体时下落包覆、随后收紧完成抓取,再在温度变化下松开释放,实现类似人手的柔性抓取过程。
根据研究团队介绍,这项技术未来有望应用于自适应软体机械手、主动滤波与调节结构、生物医学装置、温度响应构件以及可变形机器人系统等领域。 与传统驱动方式相比,该方法与3D打印工艺高度兼容,有利于制造复杂且高度定制化的内部结构,使得此前难以通过常规执行器实现的几何与运动组合成为可能。
不过,当前系统仍存在明显局限。 目前纤维的激活主要依赖热刺激,导致响应速度和能效方面尚难与成熟电机系统比肩,且整体输出能力不足以在高功率场景完全替代传统机器人执行机构。 研究人员表示,相关材料和结构设计仍处于实验阶段,后续需要在刺激方式、耐久性、能量利用效率等方面持续优化,才能真正走向工程和商业应用。
这项研究由哈佛大学团队开展,详细成果已通过该校工程与应用科学学院渠道对外发布。