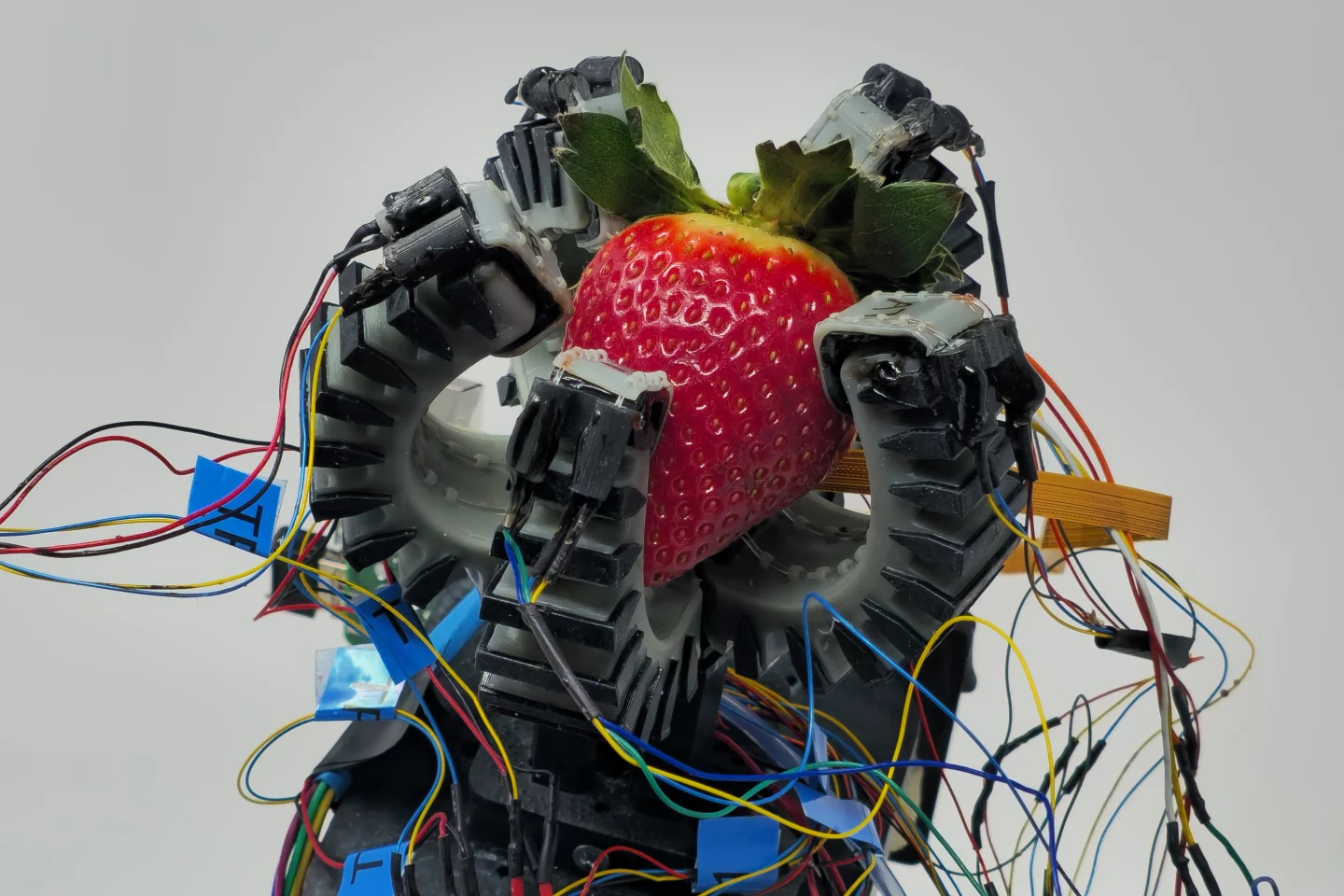
美国西弗吉尼亚大学研究团队近日开发出一款柔软却有力的软体机器人手,不仅能够温柔地采摘草莓等易损果蔬,还能在抓取过程中通过触觉和视觉综合判断成熟度,有望显著降低采摘环节的人力成本和浪费率。
据报道,农业正成为受机器人技术影响日益显著的行业之一,全球许多地区的农户正面临劳动力短缺与人工成本攀升的双重压力,在部分作物中,人工采摘费用甚至接近总生产成本的半数。对于草莓、覆盆子、牛油果等采摘窗口期极短且极易碰伤的果蔬,传统人工或刚性机械采摘往往难以兼顾效率与损耗,农民因此可能损失多达四分之一的产量。
西弗吉尼亚大学“Robiotics Lab”团队一直致力于研发模仿动物运动方式的机器人,这次推出的软体机器人手并非人们印象中的金属“机械爪”,而是从海星的解剖结构中汲取灵感,采用硅胶和聚氨酯材料制成柔软指部,同时在整体外形上仍保持类似人手的五指布局,以便更自然地拾取和握持水果。
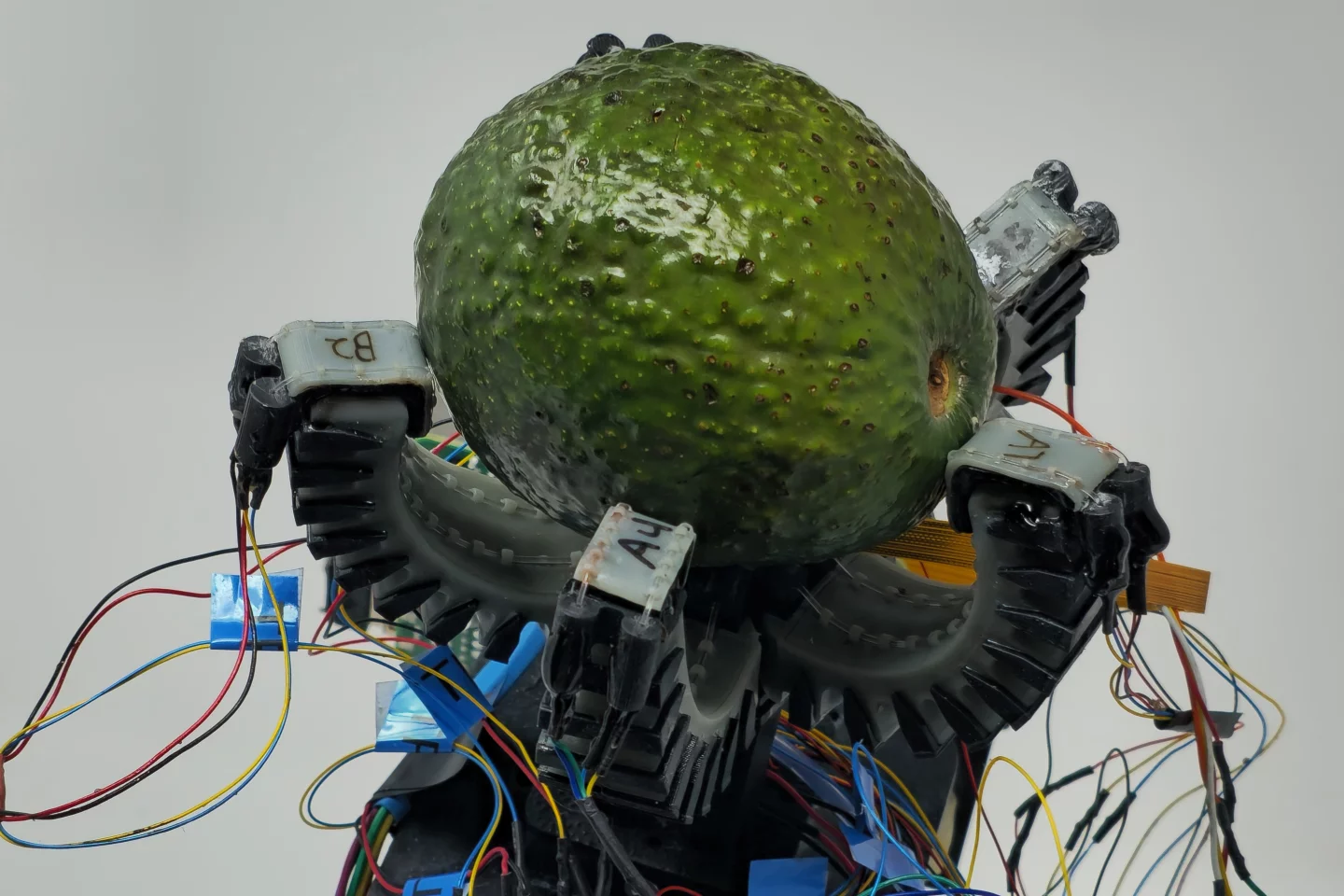
在感知能力方面,这一新型机器人手配备了微型摄像头,用于对果实外观进行视觉判断,这一功能在部分农业机器人上已有应用。然而研究人员指出,仅依赖外观并不足以精准判断成熟度,以牛油果为例,其成熟状态往往需要通过轻捏来感知,如何让机器人学会这种“人类直觉式”的判断,是本次研究的关键难点之一。
为解决这一问题,研究团队在软指内部嵌入了专用触觉传感器,使机器人在轻轻挤压果实时,既能获得关于硬度与弹性的物理信息,又不会将果实压坏。这些传感器还能实时监控握持力度,当系统判断当前抓取不够牢靠时,机器人会自动微调施力大小,以防止果实滑落或掉落地面。
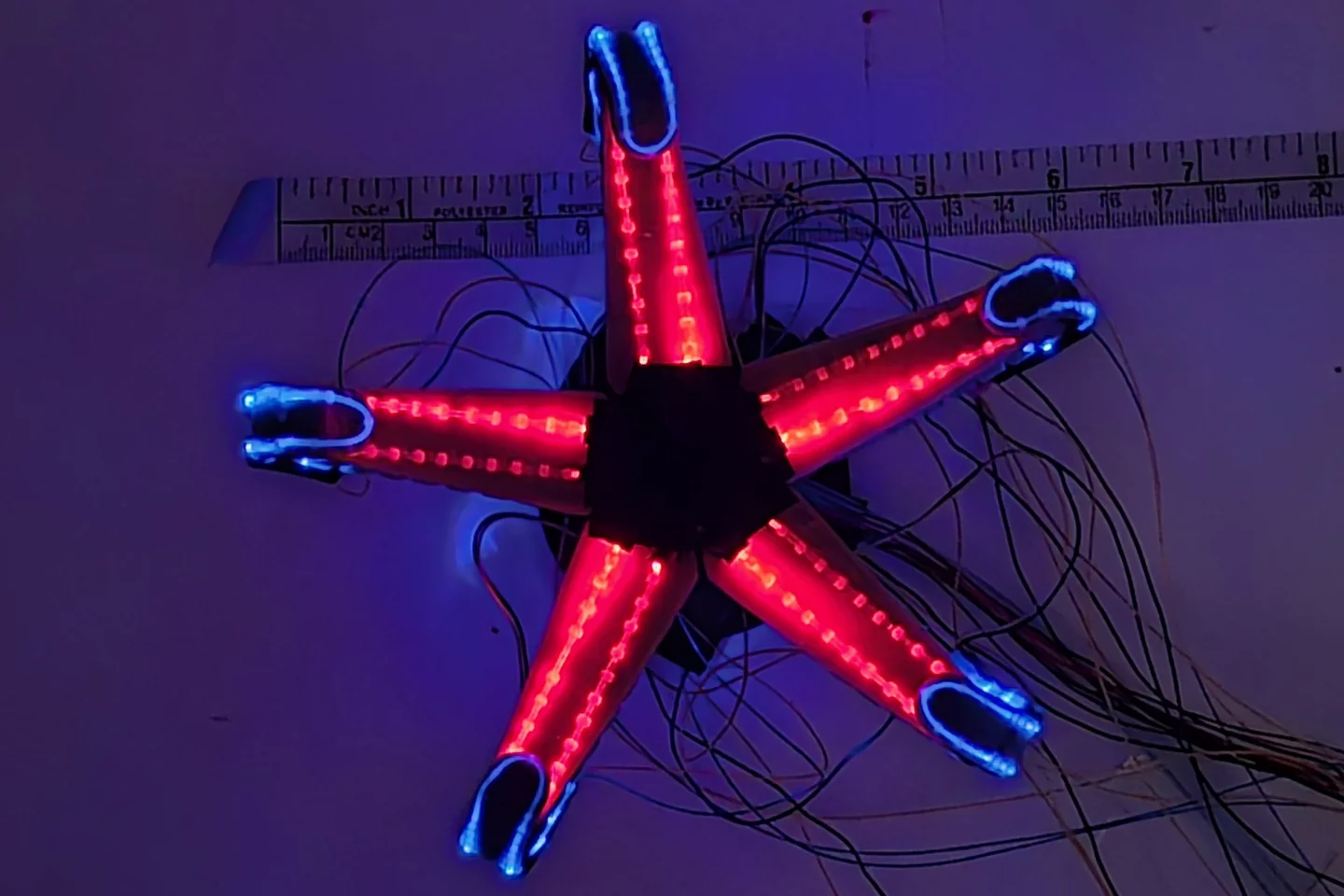
在测试阶段,机器人手展现出较高的感知与控制精度,传感器几乎可以百分之百准确预测被抓取果实的形状。当前原型设备重量不足65克,开合一次用时不到两秒,最大可举起约1千克的物体,为实际农机集成提供了轻量化和响应速度方面的基础条件。
项目负责人、机械、材料与航天工程系助理教授Anand Mishra表示,团队计划在未来两到四年内,将这一软体抓取技术推向全球市场,并正着手研发更具可扩展性的抓取装置,以满足田间大规模部署的需求。研究人员同时看好该技术在更广泛场景中的应用前景,包括太空任务中的异形物体抓取、水下环境探索以及医疗护理领域中对脆弱组织和器官的安全操作等。

相关研究论文已发表于期刊《Nature Communications》,显示以软体结构、光纤传感和视觉系统相结合的机器人抓取方案,正成为面向高损耗、高精度场景的一条重要技术路径。研究方指出,随着此类软体机器人逐步走向商业化,农场采摘一线的人力压力与果蔬浪费比例有望获得明显改善,为精细农业和智能农机的发展提供新的工具基础。