7cm半机械蟑螂火了 极端环境也能做搜救工作
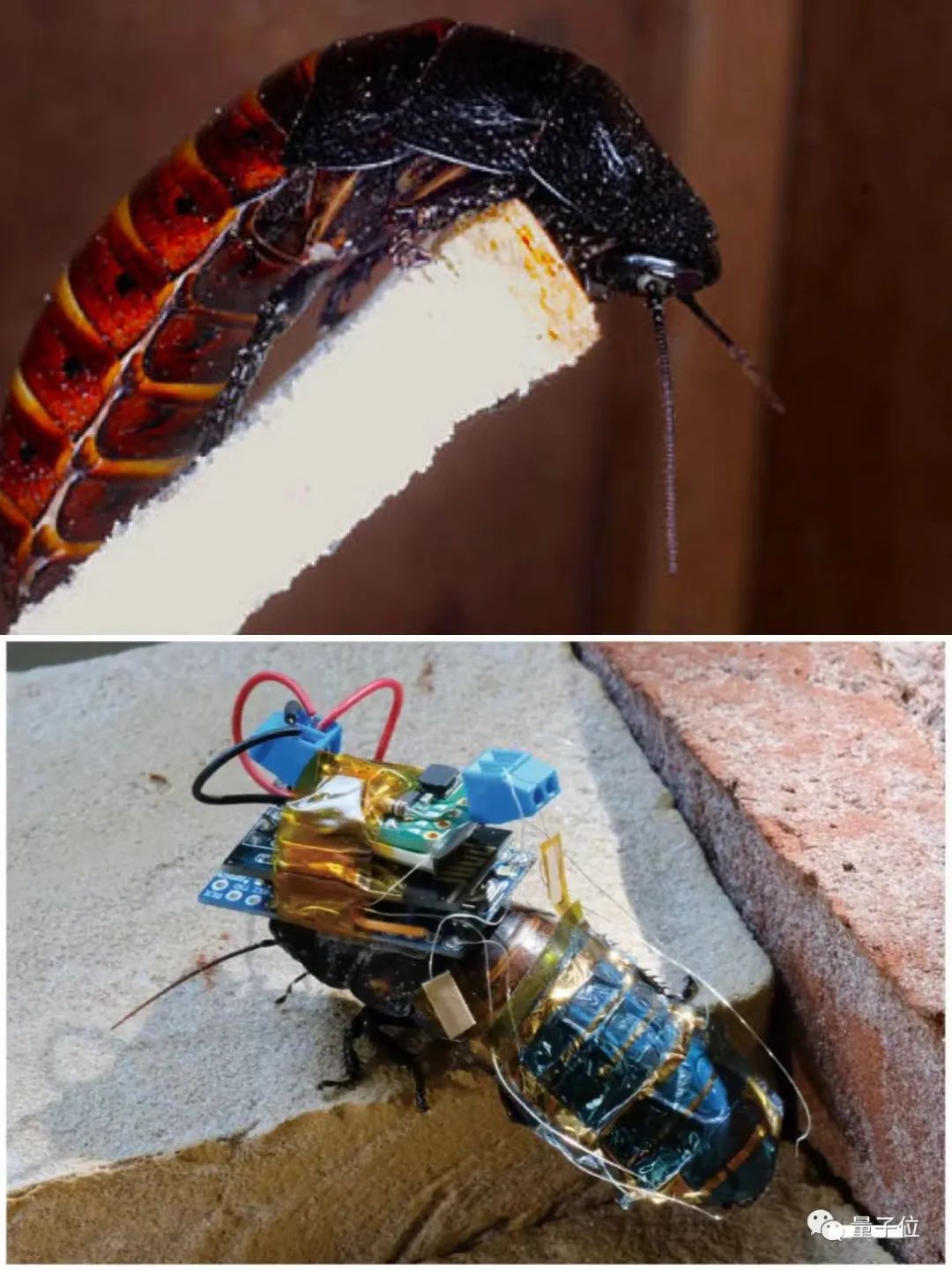
蟑螂变身!穿着机械盔甲,活脱脱就是一个“赛博小强”。慢着,拖鞋先别着急拿出来,这个“赛博小强”大有用处。这是日本用马达加斯加蟑螂改造而来的一个半机械蟑螂,身长5.1~7.6厘米。研究它的目的是为了更好地进行搜救工作。
(不愧是中二的岛国,连蟑螂也不放过)
它可以被远程操纵,还能实现远程充电续航,甚至能够在极端情况下工作,
目前相关研究成果已经发表在《npj-柔性电子》上。

“赛博小强”能耐真这么大?
不妨先来看看它的庐山真面目。
可自动充电的赛博小强
先来仔细看下这半机械蟑螂整体长啥样。
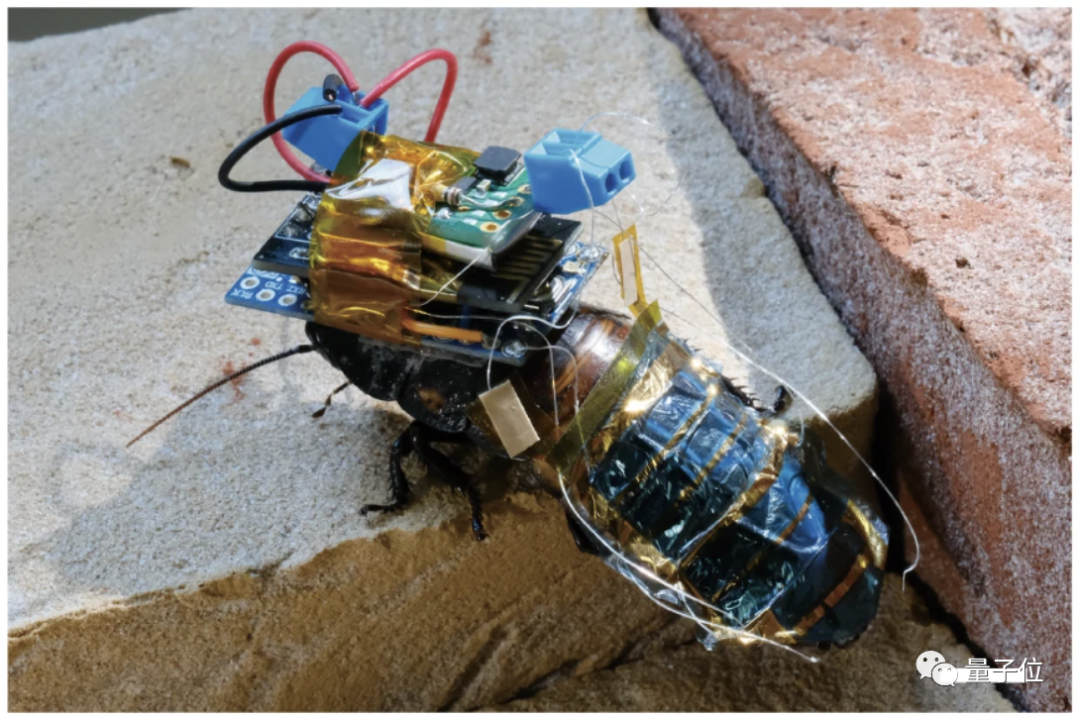
可以看到,所有的电子元件都装在蟑螂的背部。
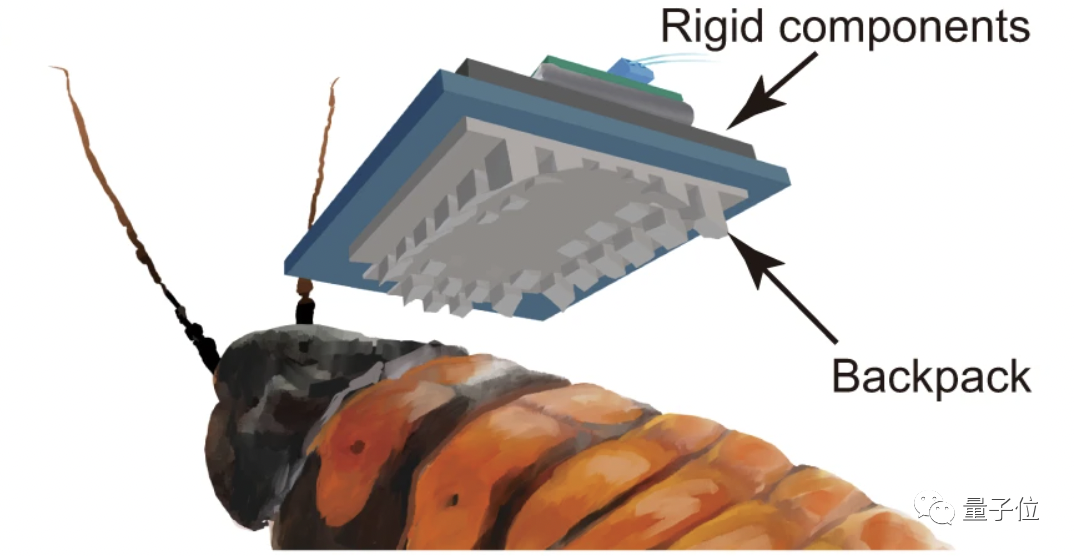
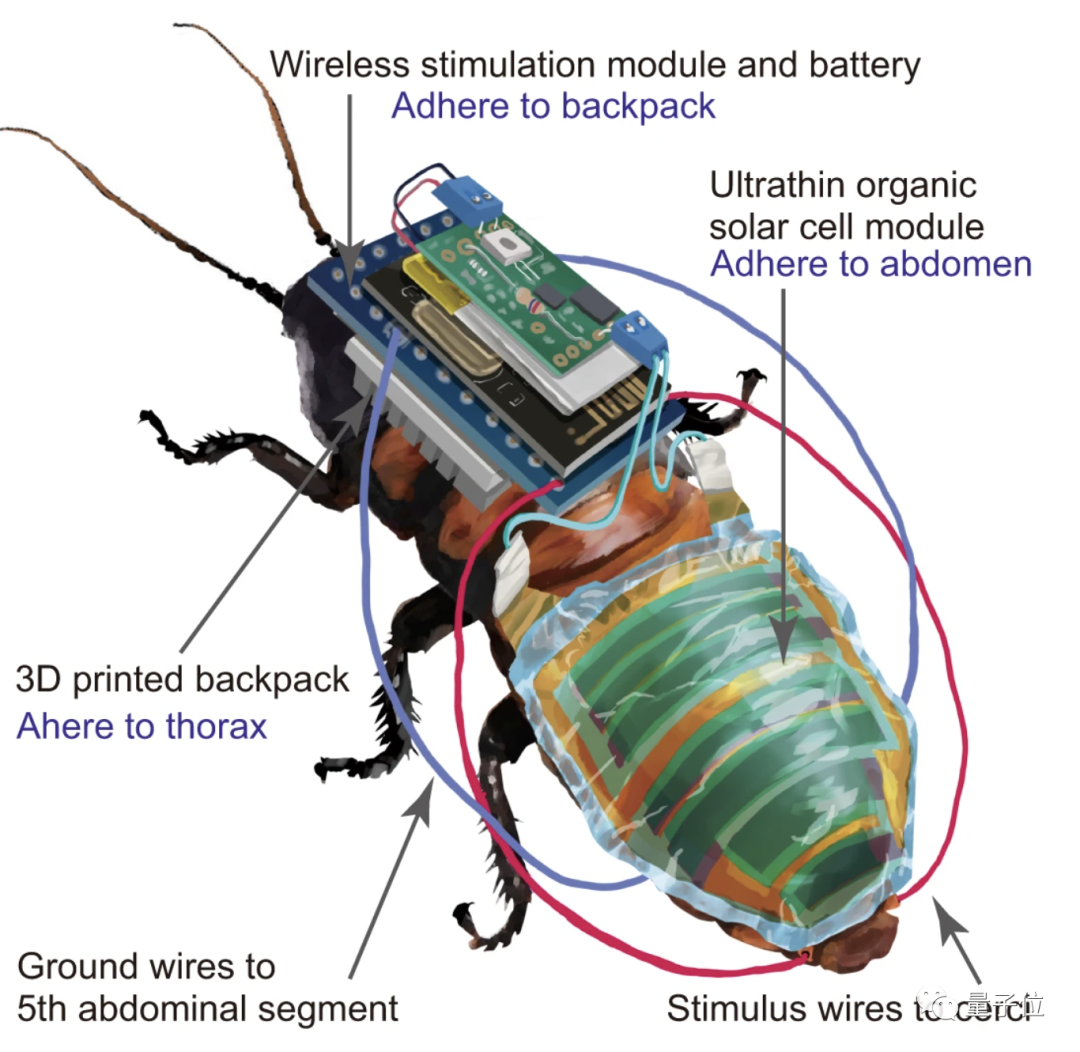
在靠头的这一侧,安装了无线运动控制模块,用来控制整个蟑螂的运动状态。这个模块是沿着蟑螂的背部曲线3D打印的,因此可以很好地固定住。
有了电子元件,肯定就需要供电系统。这个半机械蟑螂的主要电力来源于太阳能,在其尾部有附着一个4μm厚的有机太阳能电池组件。
可千万别小看这仅4μm厚的太阳能电池组件,它是此次研究突破的一个难点。
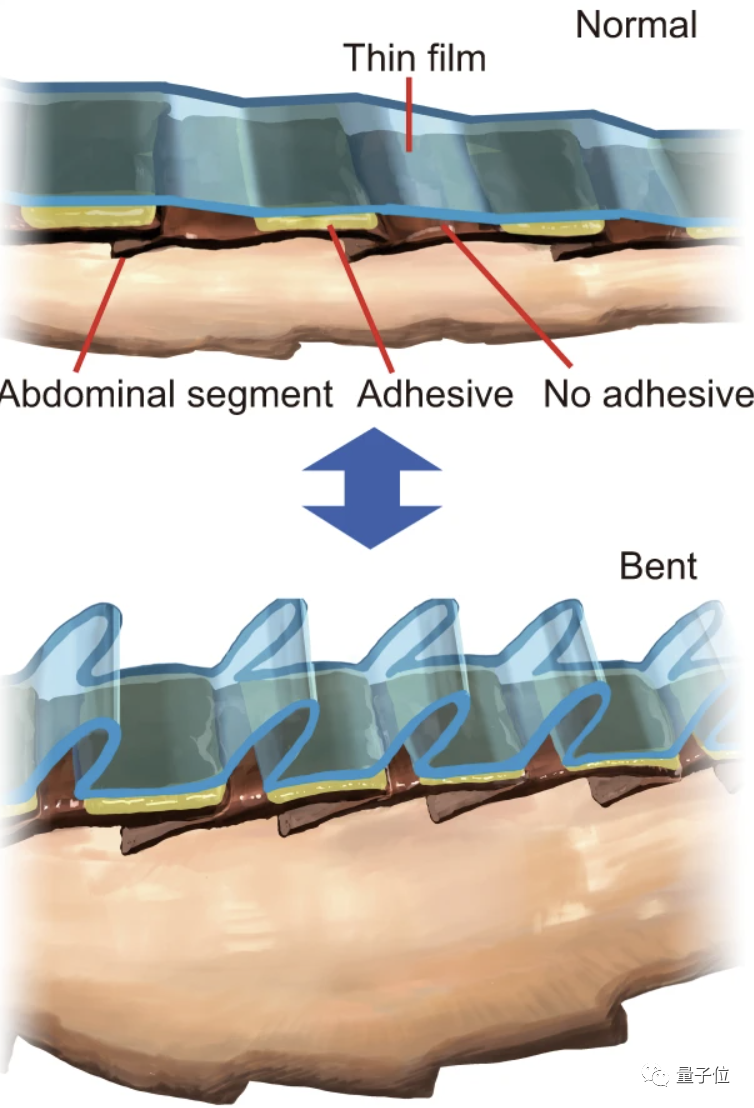
在蟑螂活动时,它的尾部会发生骨骼重叠,这对于太阳能电池组件的安装是一大挑战。
因此,为了保证蟑螂尾部能够进行正常的活动,研究人员设计了一种腹部超薄膜安装设计策略。
具体来说,就是用树脂粘合剂将薄膜附着在蟑螂腹部,当变形时,骨骼重叠的部分可以自然地去除粘合剂,薄膜呈现出中空结构,仅选择性地粘附在不重叠的部分。
除此之外,尾部超薄有机太阳能电池模块在功率上也实现了突破,论文的通讯作者Kenjiro Fukuda表示:
太阳能代持模块实现了17.2mW的功率输出,是目前最先进的昆虫能量收集装置的功率输出的50倍以上。
有了电源系统和运动控制模块,那人是怎样控制蟑螂行动的呢?
很简单,操纵者通过蓝牙连接远程控制,将运动信号从外部服务器无线传输到蟑螂的运动控制模块。
运动控制模块便会根据接受到的信号产生相应的刺激信号(说白了就是电击),进而控制整个蟑螂的运动。
但值得一提的是,在被问及控制昆虫会不会给它们造成痛苦时,Fukuda表示:
根据有关昆虫的研究,蟑螂不会感到疼痛。
前文已经提到,半机械蟑螂可以被用来开展搜救工作,并且一系列设计也都是在考虑到蟑螂的灵活性下开展的。
那它的灵活性到底如何?不妨来看看~
灵活性几乎与真蟑螂无异
话不多说,直接上效果图。
在没有进行太阳能充电之前,远程控制对蟑螂是无效的。
而在经过太阳能充电后,蟑螂明显活跃了,可以通过远程来操纵蟑螂的行动。
比如说,动动手指,就可以轻松让蟑螂拐个弯。
至于目前的“赛博小强”能不能用于现实的搜救工作,Fukuda说道:
现在的系统只有一个无线运动控制系统,因此不足以进行城市救援等应用。
要进行搜救工作,还需要给蟑螂植入集成传感器和摄像头等其他必要设备。
但这并不妨碍半机械蟑螂有这方面的潜力,不过用蟑螂做成半机械昆虫,似乎对“蟑螂恐惧者”们不是很友好。
甚至有网友直呼能不能换种生物。
其实换种生物还真可以,这种半机械的设计同样适用于蝉、甲虫等其他昆虫。
值得一提的是,在提到可以在极端环境下工作时,不少网友还联想到了“辐射条件”,而在就去年,日本批准了排放核废水的计划(细思极恐)。

对于研究出的“赛博小强”,你怎么看?
欢迎下方评论区留言~
论文链接:
https://www.nature.com/articles/s41528-022-00207-2#Sec2
参考链接:
https://metro.co.uk/2022/09/06/scientists-create-cyborg-cockroaches-whose-movements-they-can-control-17308031/



















热门评论
>>共有0条评论,显示0条