被动倾斜的旋翼显示可提高无人机的速度和效率
摘要:
据New Atlas报道,通常情况下,四旋翼无人机在向前飞行时必须将其前端向下倾斜,增加其正面面积,从而增加阻力。一种实验性的新型无人机只需倾斜旋翼即可解决这个问题。

该飞机由加州大学伯克利分校的一个团队开发,被称为QUaRTM,代表着“带有无动力旋翼倾斜机制的QUadcopter”。它有一个带有四个机臂的长方形机身,每个机臂的末端都有一个转子/电机模块。机臂不是刚性地连接到主体上,而是通过弹簧铰链连接到主体上。
在这种设置中,当产生适量的推力时,弹簧将转子水平地与机体保持一致。然而,一旦产生足够大的推力,旋翼臂就会克服弹簧的力量,暂时向前方飞行方向倾斜,相对于无人机的其他部分,倾斜度最高可达20度。
这使无人机能够向前移动,同时保持其机身水平,减少空气动力阻力。重要的是,与其他一些倾斜旋翼无人机不同,它的倾斜机制不需要动力驱动装置--旋翼已经产生的推力完成所有工作。
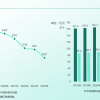
在自主飞行测试中发现,QUaRTM无人机的转子倾斜技术使其最高速度比其他方式高12.5%,此外,它显示出更好的高速灵活性(其最大"无碰撞巡航速度"高7.5%),并且在每秒15至20米(49至66英尺)的速度范围内,其功耗降低20%以上。
关于这项研究的论文--由Jerry Tang、Karan P. Jain和Mark W. Mueller领导--最近发表在《前沿》杂志上。在下面的视频中可以看到该无人机的运行情况。