跨形态机器人共享技能 无需改代码就能学会新任务
瑞士洛桑联邦理工学院(EPFL)工程学院学习算法与系统实验室(LASA)的研究团队,近日提出一种全新的“运动学智能”(kinematic intelligence)学习方法,使结构迥异的机器人可以通过同一套学习算法掌握相同任务,无需为每种机器人单独改写或定制控制代码。 这一成果有望显著降低工业和科研场景中部署新机器人技能的时间和成本。
在人类世界里,我们通过观察、模仿和调整他人行为来学习新技能已持续了约30万年,这对同类之间相对容易实现。 但当对象换成身体结构和认知方式截然不同的其他动物时,简单模仿就变得困难;对于植物、真菌、原生生物甚至细菌,人类更谈不上“向它们学习”动作技能。 在机器人领域,即便我们已经能让机器人按照人类示范执行动作,甚至以远高于人类的速度完成任务,但如何让结构和系统完全不同的机器人共享同一套学到的技能,仍是长期难题。
在最新发表于《Science Robotics》的论文中,Sthithpragya Gupta 和 Aude Billard 等人提出,利用“学习‑示教(learning-from-demonstration,LfD)”框架下的运动学智能,可以让外形差异如同R2D2与洗碗机般悬殊的机器人,从同一次人类示范中习得可各自执行的新动作。 与以往只在同型号机器人之间迁移技能的做法不同,这一系统会对示范动作进行数学建模,将其转化为可以适配到不同机器人关节布局、运动范围和稳定性约束上的通用策略。
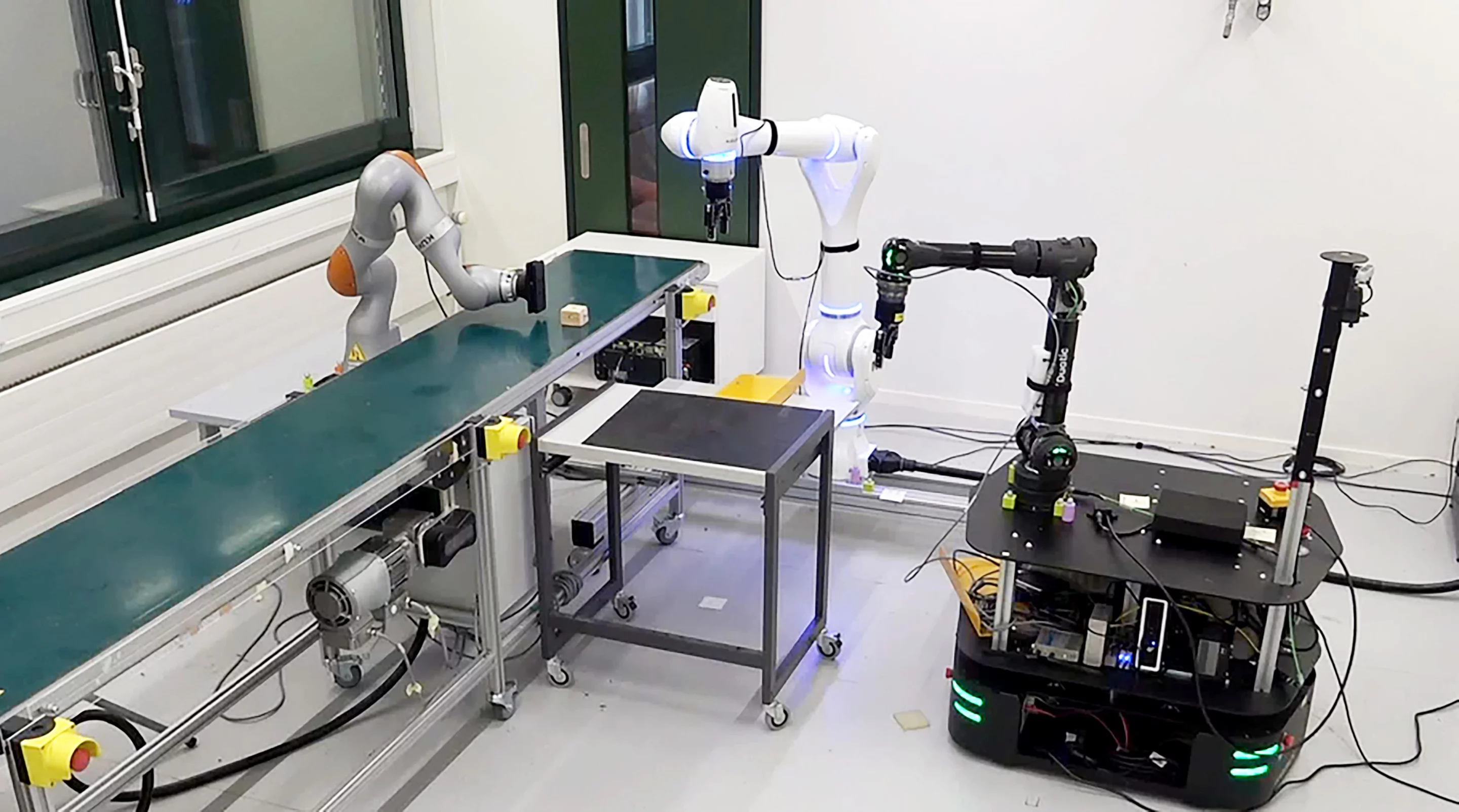
研究团队首先通过动作捕捉记录人类在工业装配情景中对物体进行摆放、推动、抛掷等一系列操作。 随后,他们建立起一套用来描述机器人自身物理约束的分类体系,包括平衡极限、关节活动范围等,并将这些信息与动作捕捉数据结合,形成可被不同平台调用的观测与自适应学习模型。 在实验中,三台在外形和机构上完全不同的商业机器人,仅通过观察人类示范,就能够稳定地完成将木块从传送带推到工位、再搬运至桌面,最后抛入指定容器等一整套操作流程。
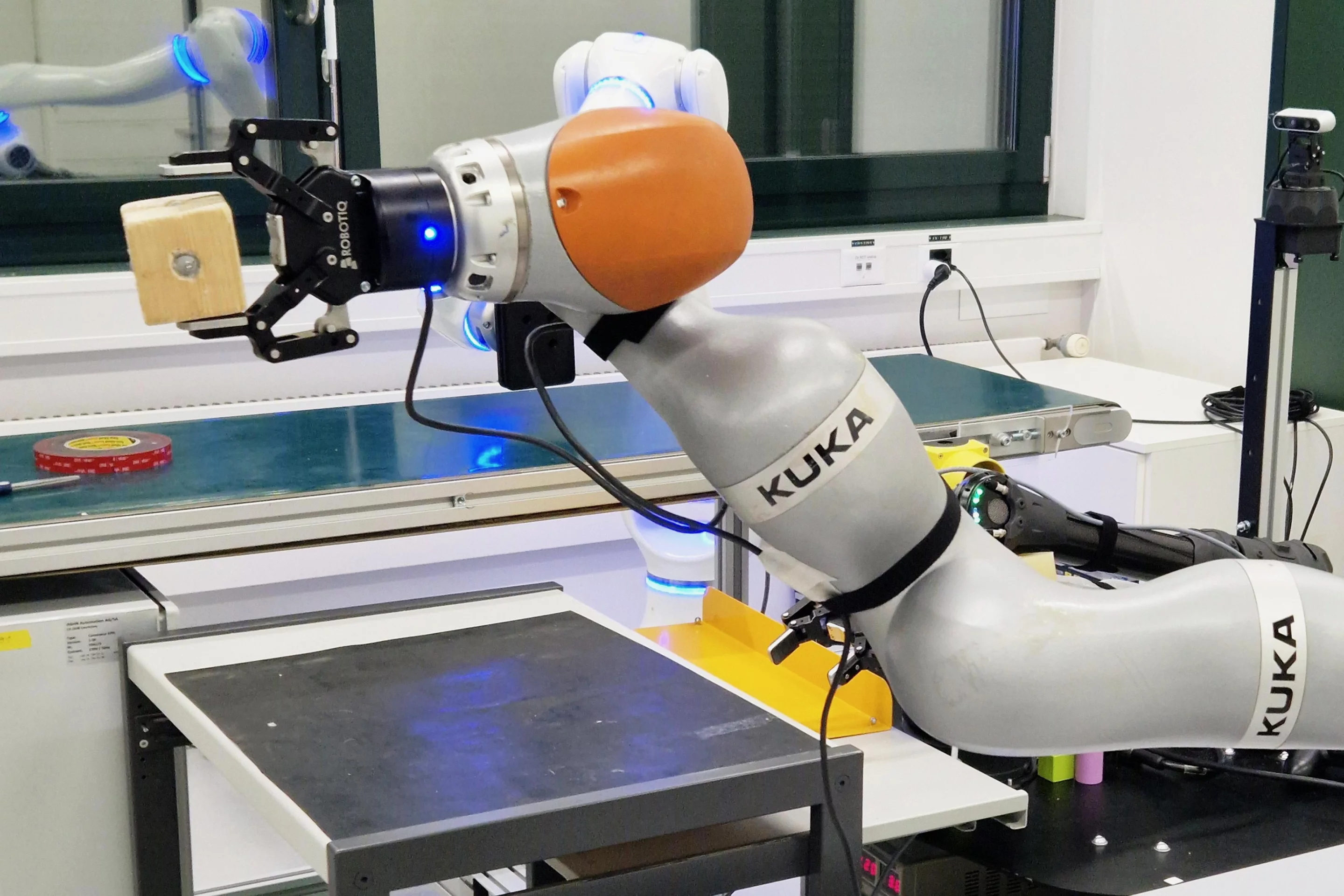
核心技术之一是所谓“全局稳定动力系统”(globally stable dynamical system),它使得机器人在学习到的动作空间内可以保证运动过程的可预测性和安全性。 研究人员表示,每一台机器人在执行任务时负责的步骤可以互换调整,系统依然能够正常工作;不同机器人会以符合自身物理条件的方式来理解并重构同一项技能,但始终保持在安全、可行的范围内。 LASA 实验室负责人 Aude Billard 指出,这项工作解决了机器人学领域一个长期存在的挑战:如何在机械结构各异的机器人之间迁移已学会的技能,同时确保行为可预测且安全可靠。
从应用角度看,这种运动学智能框架意味着,工业生产线或服务场景中新增或替换机器人时,不再需要为每款新硬件重写动作代码,只需提供有限次甚至一次人类示范即可完成技能注入。 这不仅减少了对专业编程和控制理论知识的依赖,还为中小企业使用多样化机器人设备降低了门槛。 论文共同第一作者 Gupta 强调,在实验中,各机器人分担任务步骤的方式可以随时调整,而整个系统依旧能顺利完成作业流程,显示出高度的灵活性。
项目的下一步目标,是让人类操作者甚至无需亲自做示范动作,仅通过自然语言描述,即可让机器人生成并执行对应的行为。 另一位共同第一作者 Durgesh Haribhau Salunkhe 表示,团队希望彻底消除对技术背景的要求:用户只需带来想法和期望行为,剩下的由机器人自动完成。 如果相关研究持续推进,这种“跨形态共享技能”的学习方式有望成为未来机器人系统的基础能力,加速机器人在更多真实世界场景中的落地部署。